
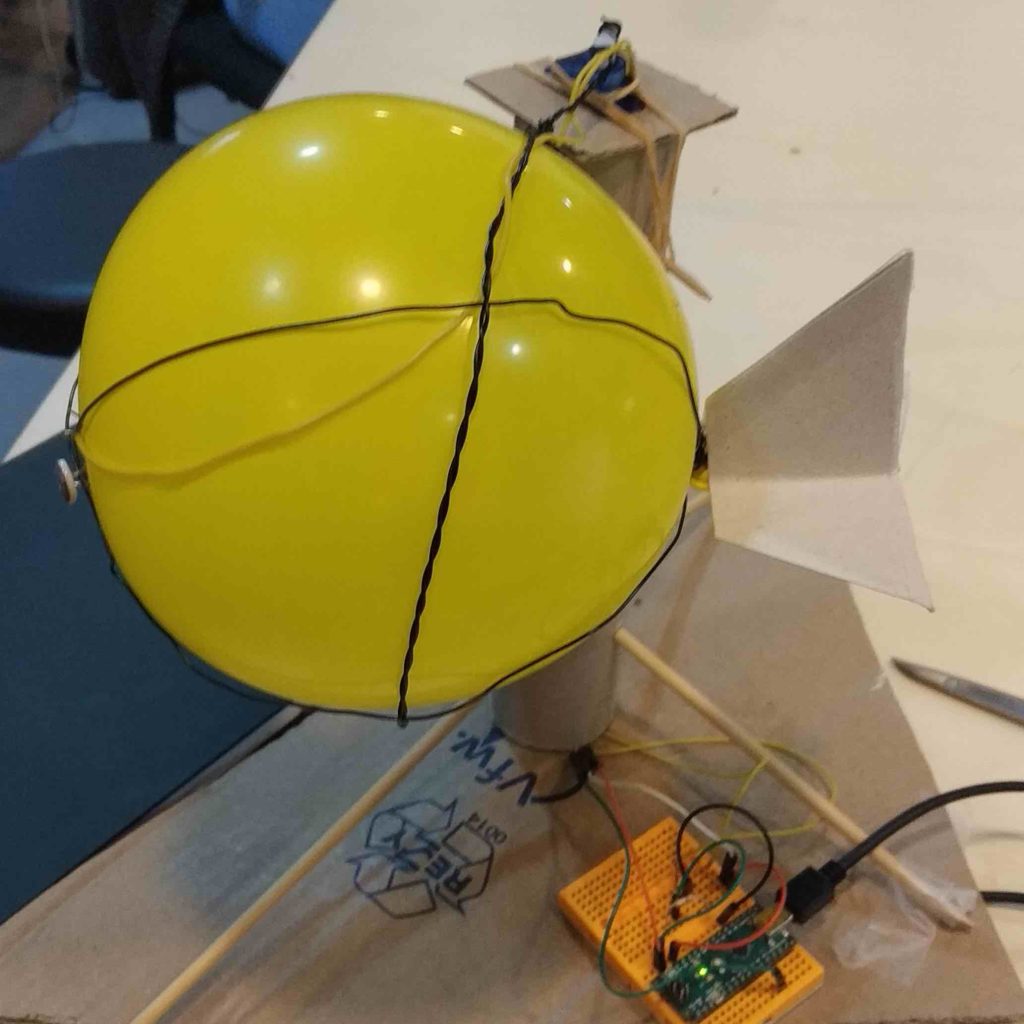
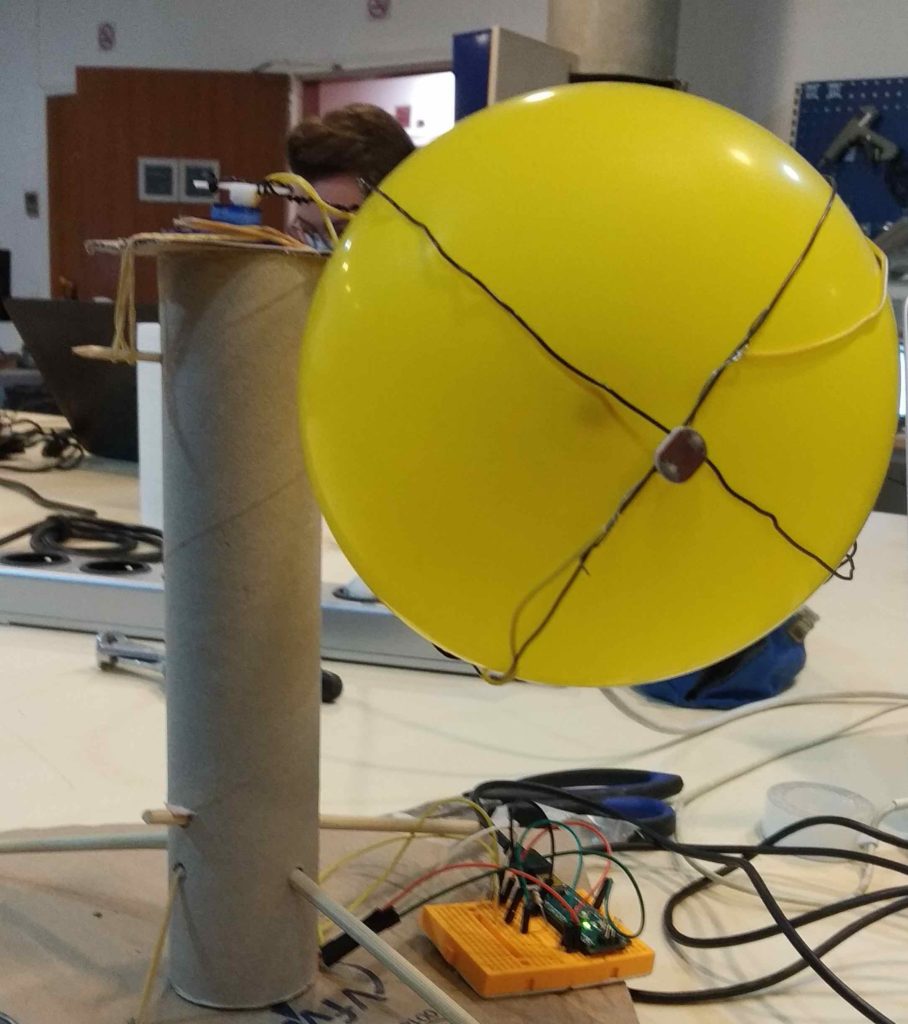
L’objet est une sorte de petit mobile sur lequel est accroché un ballon. Ce ballon est muni d’un capteur de luminosité. Plus le ballon capte la luminosité plus la ballon va avancer sur son axe. Dans le cas contraire il reculera.
Voici le code:
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
int LDR;
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
Serial.begin(9600);
}
void loop() {
LDR = analogRead(A0);
pos = map(LDR, 0, 1000, 180, 0);
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(500);
Serial.println(LDR);
}BONUS! Si vous échangez dans la ligne « pos = map(LDR, 0, 1000, 180, 0); » les valeurs 180 et 0 vous avez un petit animal qui n’aime pas la lumière et qui suit votre mains si vous touchez son museau!