Le code:
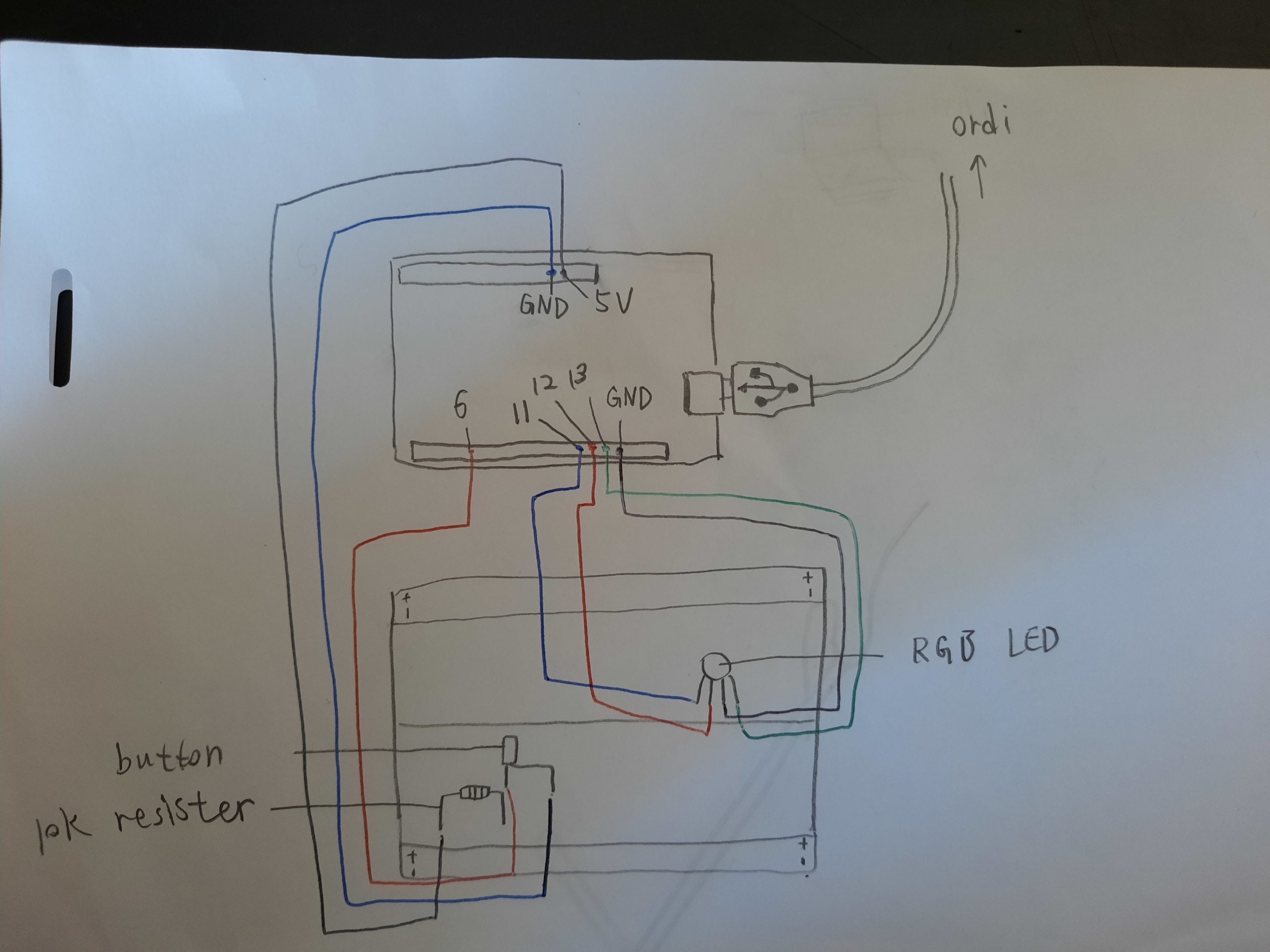
int led[] = {11, 12, 13};
int tilt;
void setup() {
Serial.begin(9600);
pinMode(led[0], OUTPUT);
pinMode(led[1], OUTPUT);
pinMode(led[2], OUTPUT);
}
void loop() {
tilt = digitalRead(6);
if (tilt == HIGH){
digitalWrite(led[random(0,3)], HIGH);
delay(500);
} else {
digitalWrite(led[0], LOW);
digitalWrite(led[1],LOW);
digitalWrite(led[2],LOW);
Serial.println(tilt);
}
}