
L’idée de ce projet est de reproduire, via un tissu, un mouvement organique, présentant une irrégularité rappelant un organisme vivant et indépendant. Le textile, mouvant est sensé faire le lien entre intérieur et extérieur. Dans un futur lointain, la population est telle qu’il est nécessaire d’organiser une « allocation optimale » des personnes dans l’espace, ainsi le tissu avertit de la présence de personne dans un espace donné. Par exemple, le capteur peut être placé dans un centre commercial, ainsi si le lieu est rempli, le tissu placé à l’extérieur avertira de la foule interne.
Le tissu est relié à plusieurs fils, eux même entrainés par des servo moteur. L’idée est d’utiliser un tissu dense, et plutôt lourd, afin que ce dernier puisse être étiré sans déchirement. Plusieurs scénarios (moteur) sont possibles, et se déclenchent selon les données collectées par le capteur.
Références :
Premier test de visuels de tissus cousues.
Suite à plusieurs tests sur différents tissus, nous avons décidé que l’installation jouerait sur la distance entre le spectateur et un capteur, disposé au côté du tissu. Ce dernier est suspendu à un cadre, lui même accroché au plafond, ou juste adossé au mur.
Le code (1) produit le comportement du tissu de tel sortes que ce dernier réagisse selon la distance qui sépare le spectateur et le capteur. Ainsi plus le spectateur serait proche du capteur, plus le tissu bougera. Le mouvement est pensé pour provoqué l’étonnement, la gène. Il ne présente aucune qualité anthropomorphique pourtant il surprend de part son « comportement » réactif vivant.
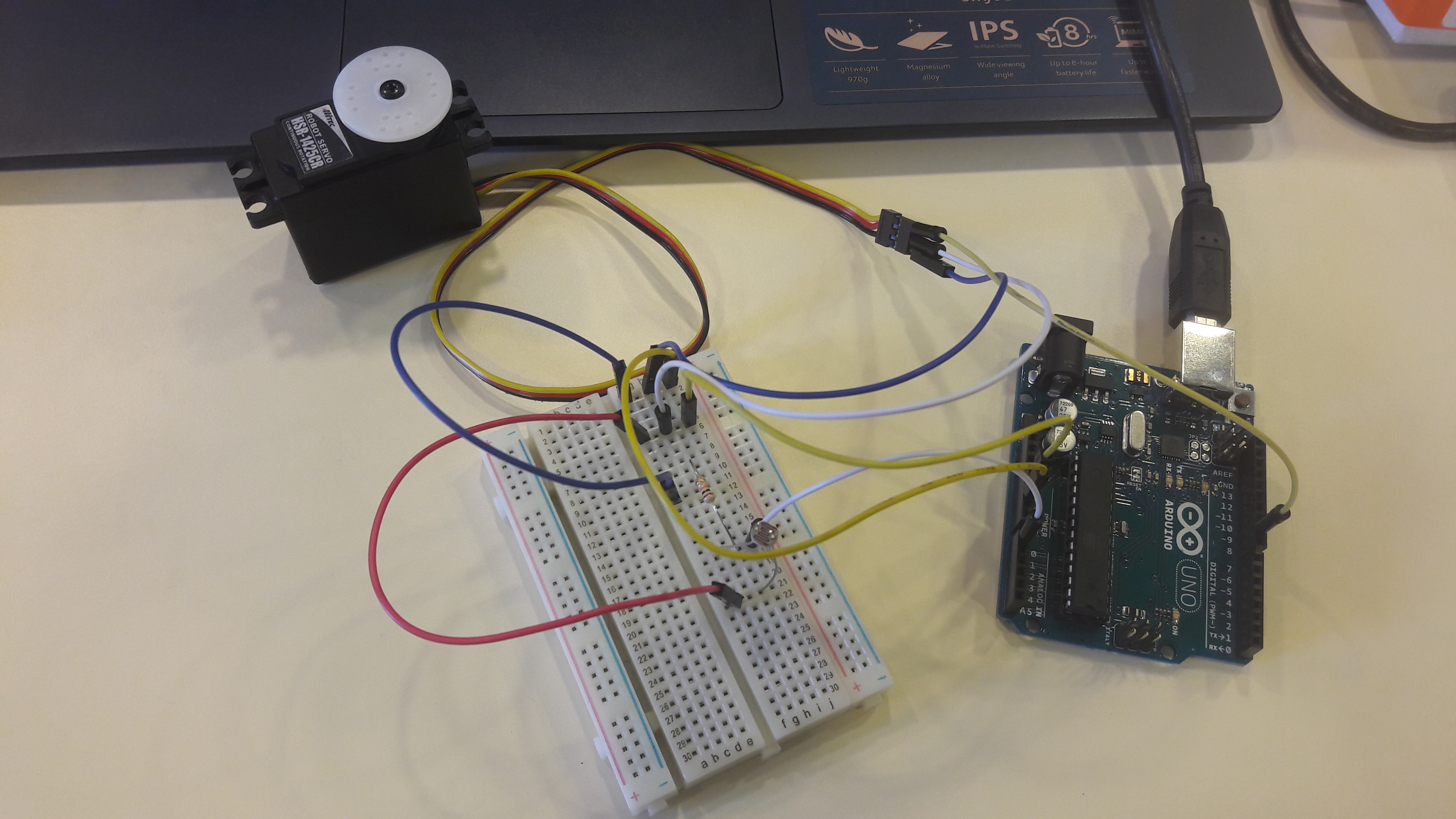
Branchements avant soudure :
Test d’attache au servo :
(1)
#include <Servo.h>
Servo myservo;
Servo myservo2;
Servo myservo3;
int capteur = A0;
int capteurValeur = 0;
void setup() {
myservo.attach(6);
myservo2.attach(3);
myservo3.attach(9);
//pinMode(pos,OUTPUT);
Serial.begin(9600);
}
void loop() {
capteurValeur= analogRead(capteur);
capteurValeur= map(capteurValeur,0,300,0,10);
Serial.print(« capteurValeur »);
Serial.println(capteurValeur);
//
myservo.write(100 + capteurValeur);
delay(100);
myservo.write(90 – capteurValeur);
delay(100);
myservo2.write(100 + capteurValeur);
delay(100);
myservo2.write(90 – capteurValeur);
delay(100);
myservo3.write(105 + capteurValeur);
delay(1000);
myservo3.write(92 – capteurValeur);
delay(1000);
}