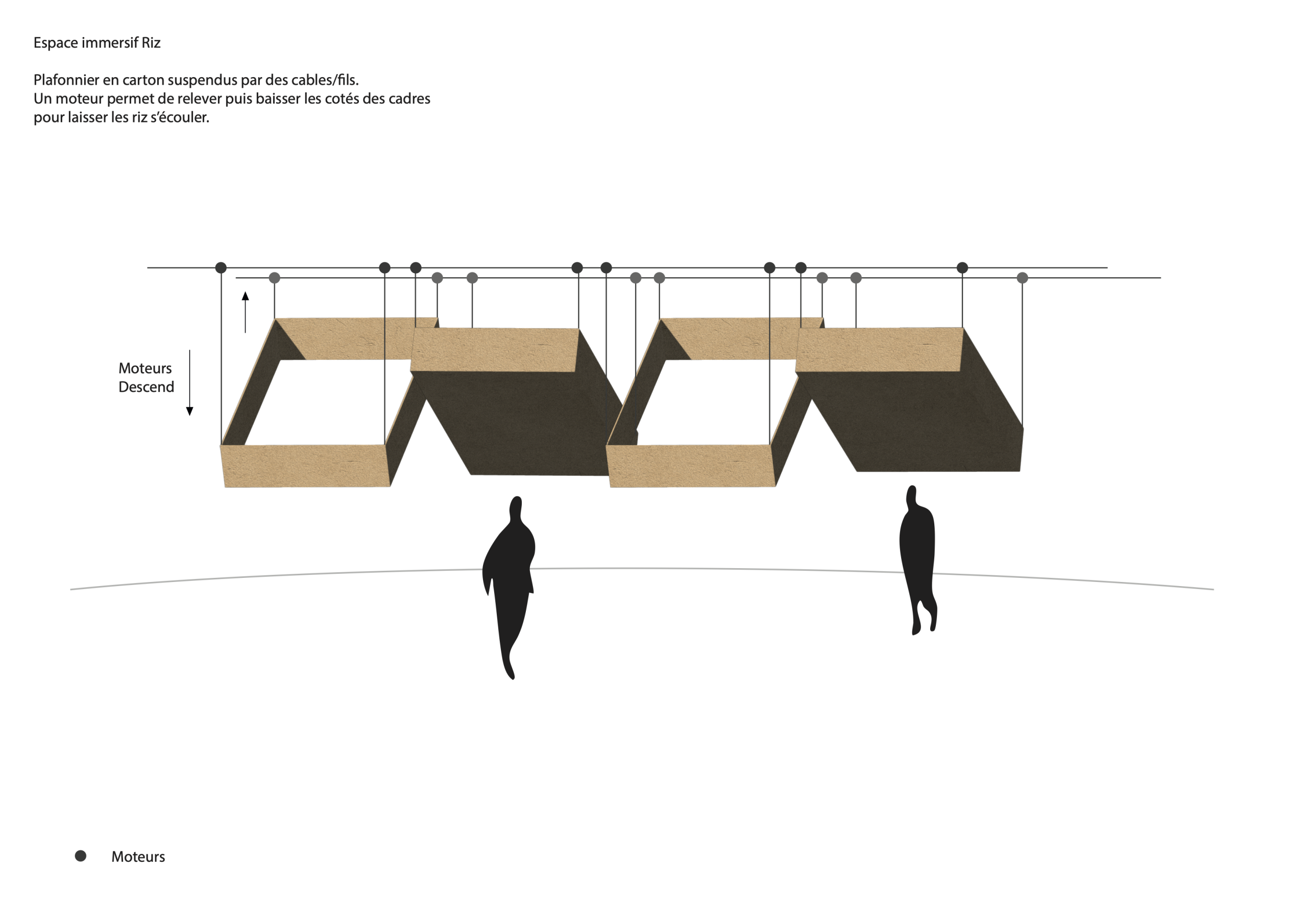
Etape 1 : Tests moteurs
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
https://www.arduino.cc/en/Tutorial/LibraryExamples/Sweep
*/
#include <Servo.h>
Servo myservo; // create Servo object to control a servo
// twelve Servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the Servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(8); // waits 15 ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(8); // waits 15 ms for the servo to reach the position
}
}
Conclusion des tests moteurs :
Marche mais trop rapide pour l’instant
Tests Moteurs avec maquette carton :
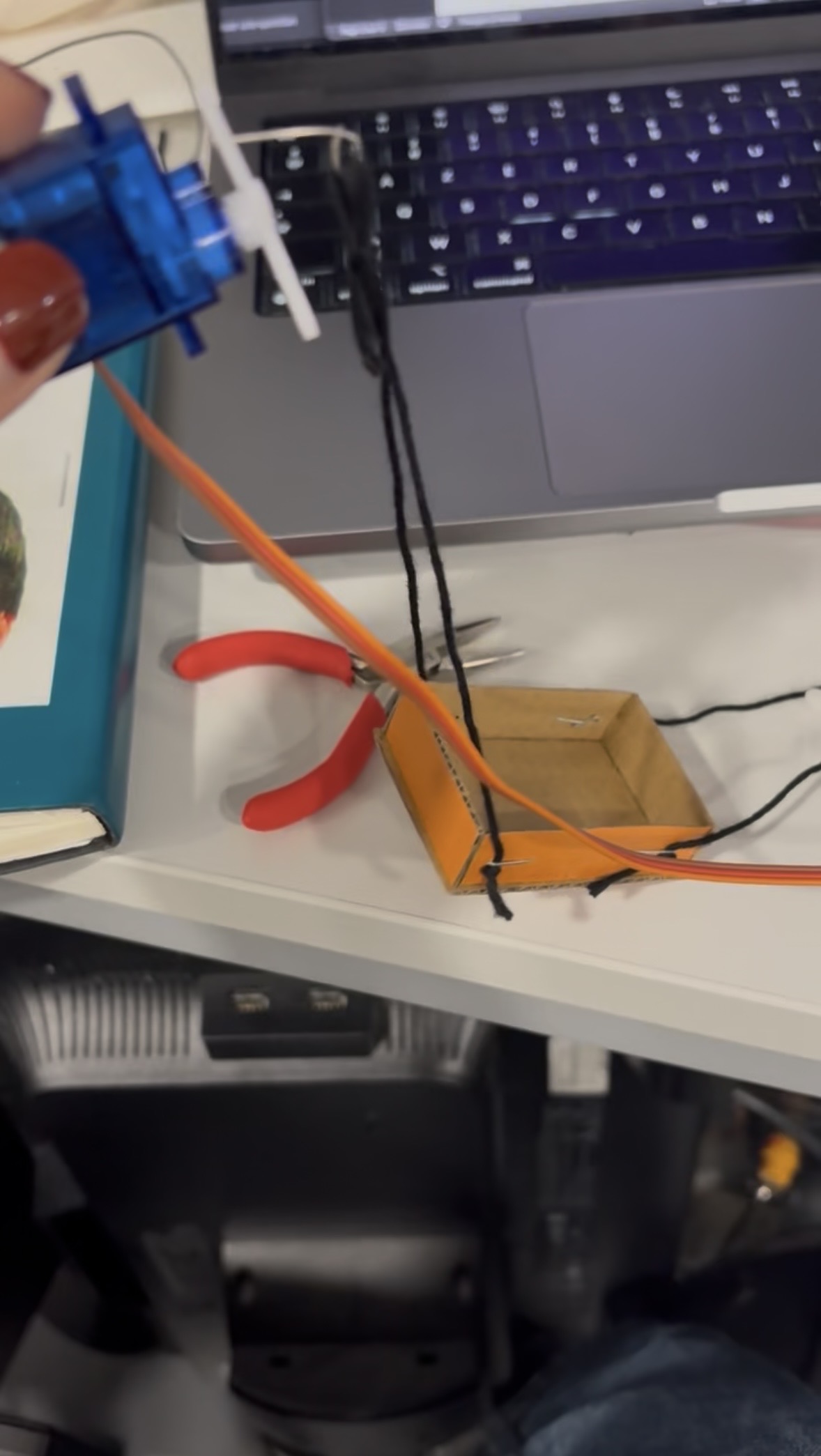
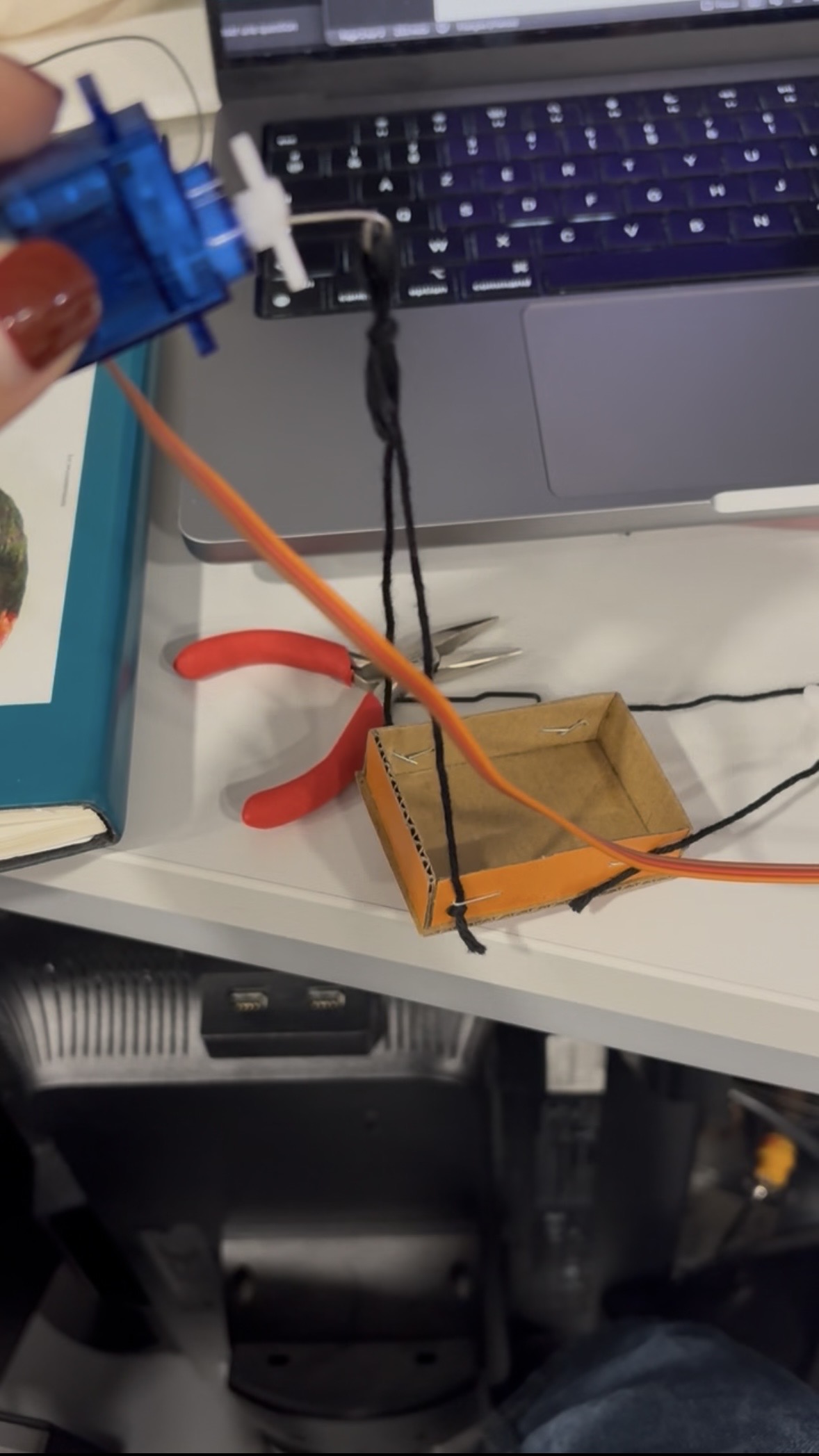
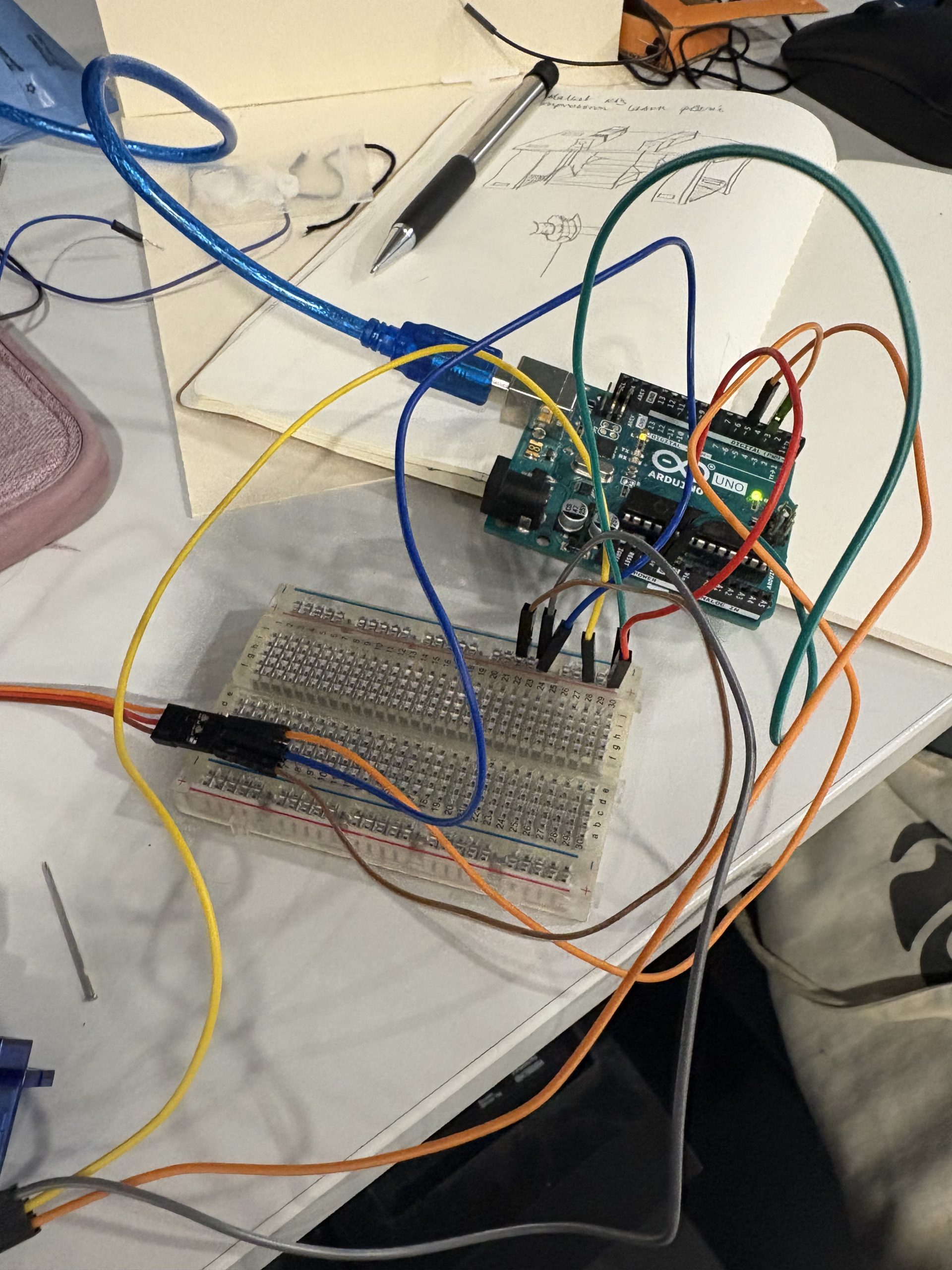
Branchements Moteur :
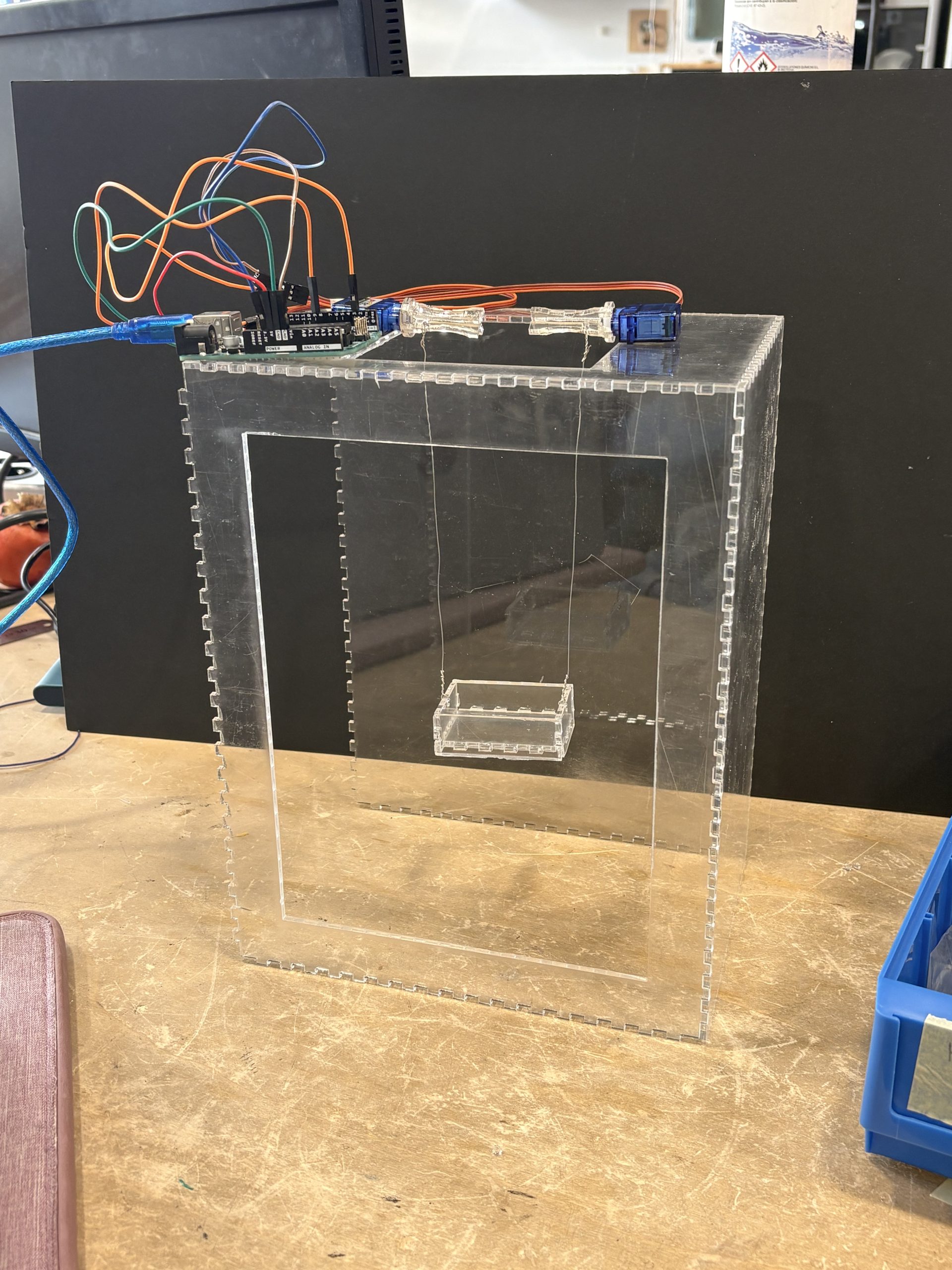
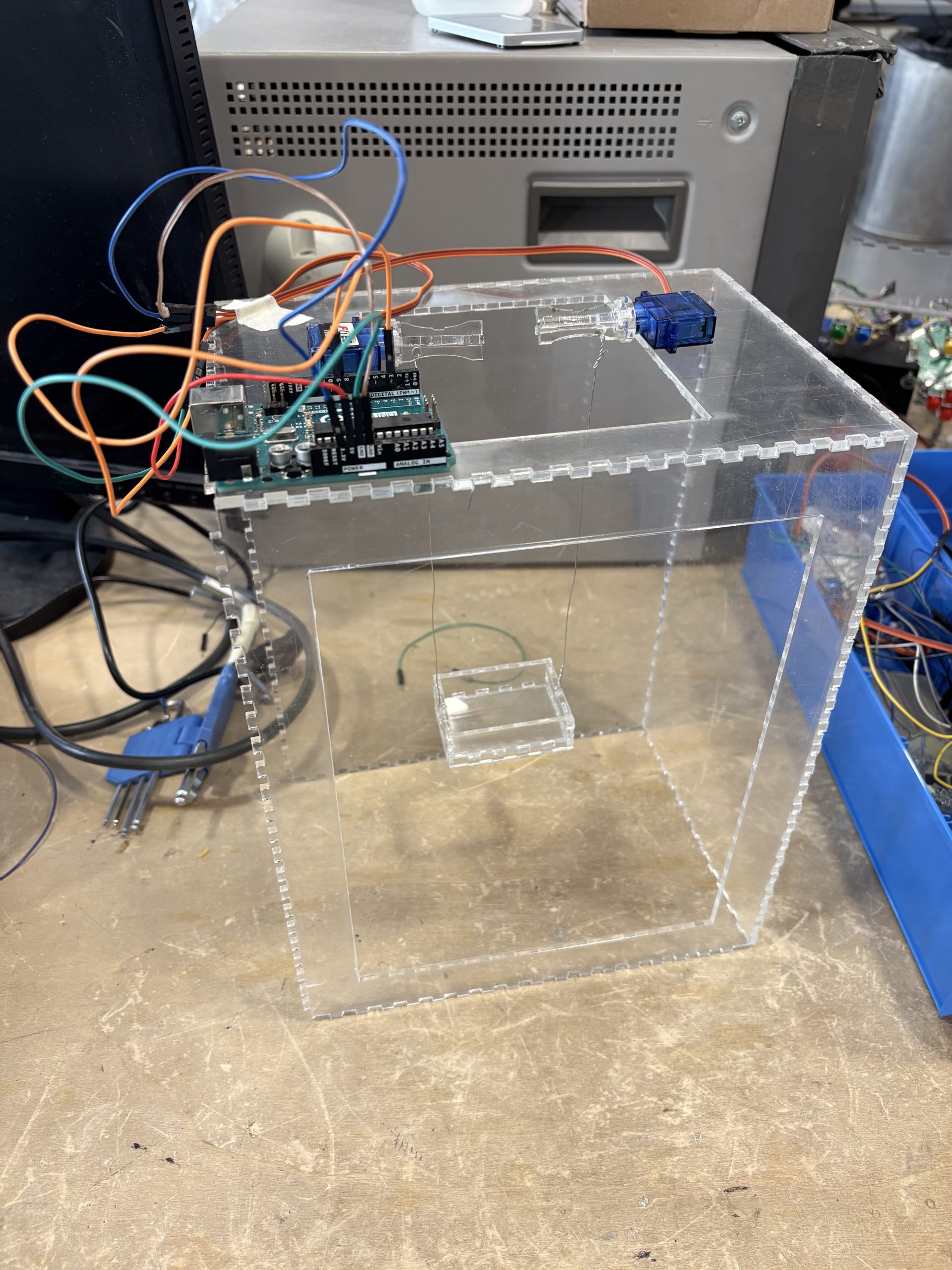
Maquette finale (plexi transparent) :
Nouveau code 2 moteurs :
#include <Servo.h>
Servo servo1; // servo sur pin 9
Servo servo2; // servo sur pin 3
int pos = 0;
void setup() {
servo1.attach(9); // premier moteur
servo2.attach(3); // deuxième moteur
}
void loop() {
// Aller
for (pos = 0; pos <= 180; pos += 1) {
servo1.write(pos); // servo 1 va de 0 → 180
servo2.write(180 - pos); // servo 2 va de 180 → 0
delay(8);
}
// Retour
for (pos = 180; pos >= 0; pos -= 1) {
servo1.write(pos); // servo 1 va de 180 → 0
servo2.write(180 - pos); // servo 2 va de 0 → 180
delay(8);
}
}Conclusions sur ce code :
Encore un peu rapide