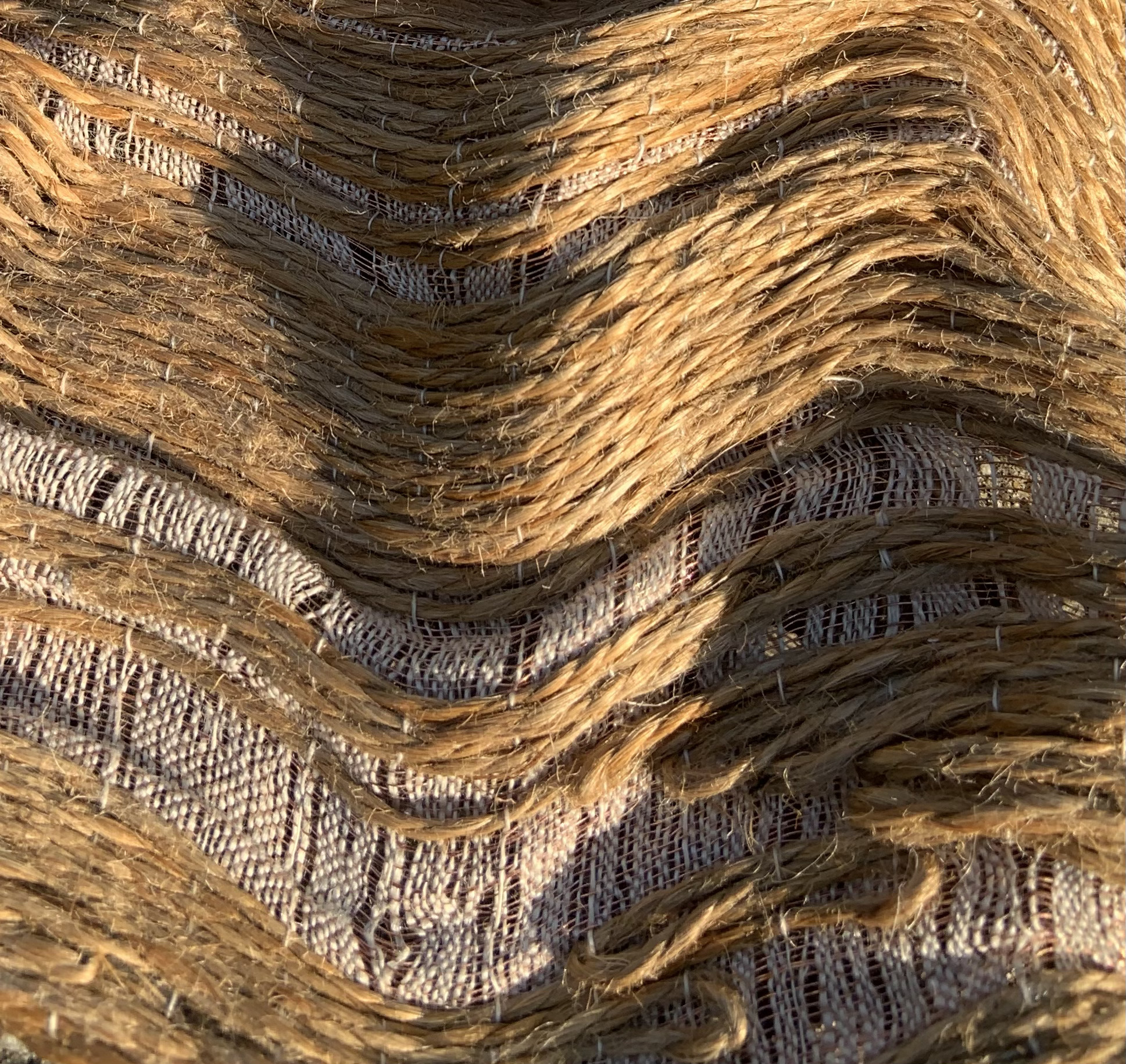
Ce projet a pour objectif d’amplifier la sensorialité du textile à l’aide du numérique avec les logiciels : Processing et Arduino.
Dans un premier temps, Il fallait agir sur le toucher donc en utilisant des vibreurs.
Ensuite, le dessin moiré avec le potentiomètre ont été travailler à part.
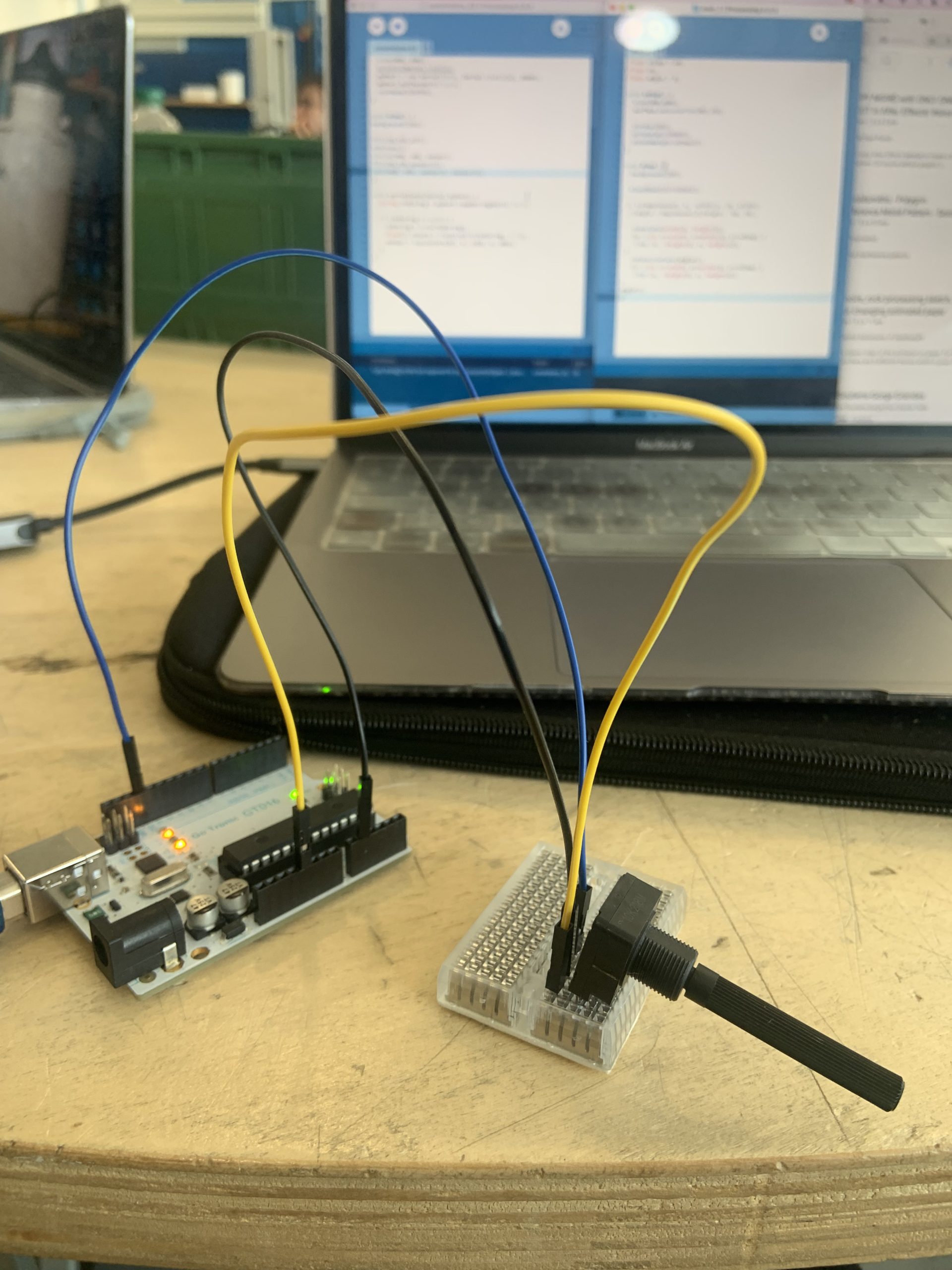
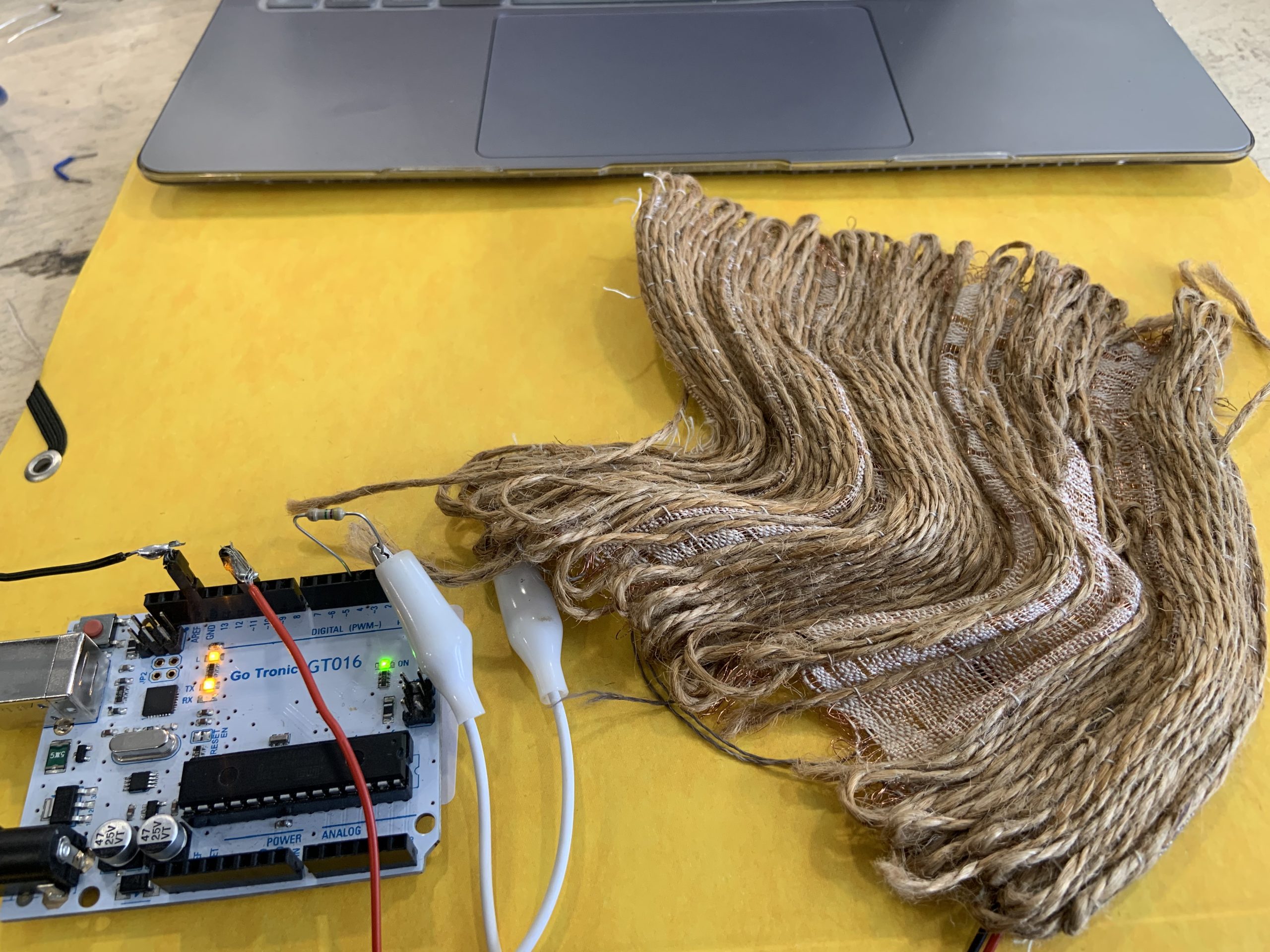
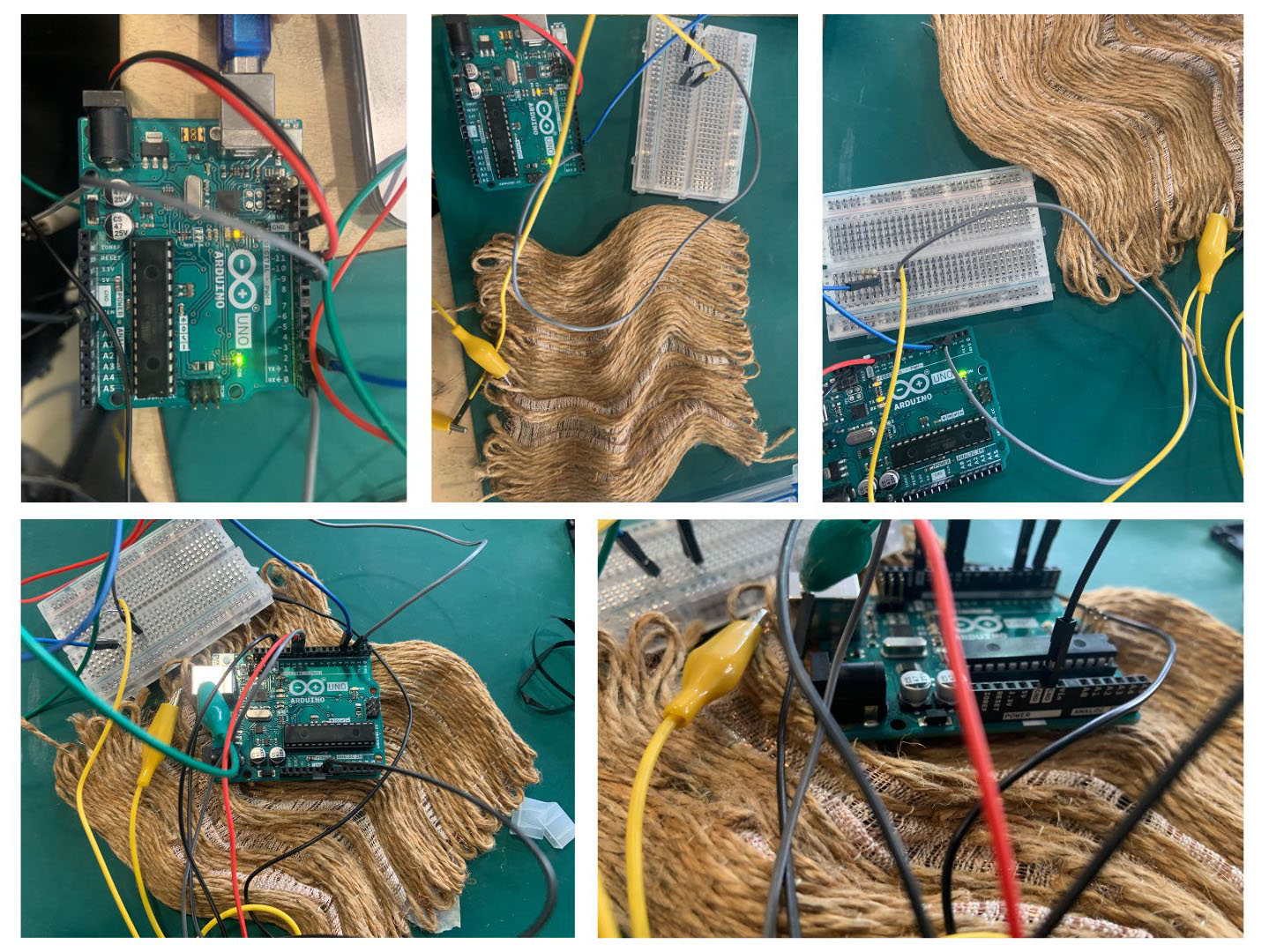
Les premiers tests ont été fait avec un potentiomètre, avant de le remplacer par le textile, qui va donc devenir l’antenne.
Pour finir, il fallait tout rassembler.
Codes :
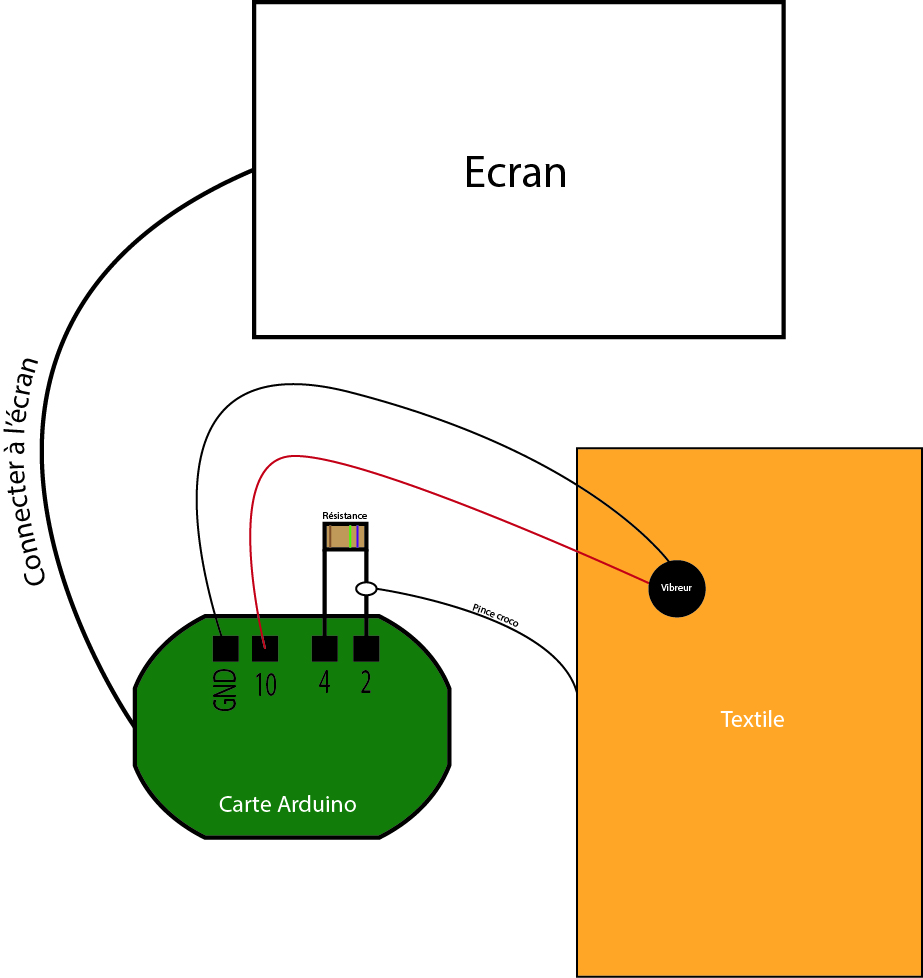
Sur Arduino :
#include <CapacitiveSensor.h>
CapacitiveSensor cs_4_2 = CapacitiveSensor(4, 2); // 10M resistor between pins 4 & 2, pin 2 is sensor pin, add a wire and or foil if desired
int vibreur = 10;
int vibreurValue;
void setup() {
cs_4_2.set_CS_AutocaL_Millis(0xFFFFFFFF); // turn off autocalibrate on channel 1 - just as an example
pinMode(vibreur, OUTPUT);
Serial.begin(9600);
}
void loop() {
long start = millis();
long total1 = cs_4_2.capacitiveSensor(30);
total1 = constrain(total1, 200, 3000);
vibreurValue = map(total1, 200, 3000, 0, 255);
analogWrite(vibreur, vibreurValue);
Serial.println(total1); // print sensor output 1
}
Sur Processing :
1.
//librairie
import processing.serial.*;
//Connect arduino
Serial myPort;
//variable pour le capteur
float sensor = 0;
int diaMin = 1;
int diaMax = 2000;
int diaStep = 10;
float xx, yy, angle;
void setup() {
size(900, 900);
surface.setLocation(987,70);
noFill();
stroke(0);
strokeWeight(diaStep/6);
//definir le port
println(Serial.list());
myPort = new Serial(this, Serial.list()[2], 9600);
myPort.bufferUntil('\n');
}
void draw() {
background(255);
xx = sin(radians(angle))*200;
yy = cos(radians(angle))*200;
translate(width/2, height/2);
for(int dia=diaMin; dia<diaMax; dia+=diaStep){
ellipse(0, 0, dia, dia);
ellipse(xx, 0, dia, dia);
//ellipse(width/2-mouseX, 0, dia, dia);
}
angle = sensor;
println(angle);
}
//fonction pour lire ton capteur
void serialEvent(Serial myPort) {
String inString = myPort.readStringUntil('\n');
if (inString != null) {
inString = trim(inString);
float[] colors = float(split(inString, ","));
sensor = map(colors[0], 200, 3000, 0, 700);
}
}
2.
import processing.serial.*;
float sensor = 0;
float xStep = 15;
float angle = sensor;
// paramètres du bruit de Perlin
float amplitude = 10;
float noiseScaleX = 0.01;
float noiseScaleY = 0.01;
float phase = 100;
Serial myPort;
void setup() {
size(900, 900);
surface.setLocation(987, 70);
noiseDetail(4, 0.5);
println(Serial.list());
myPort = new Serial(this, Serial.list()[2], 9600);
myPort.bufferUntil('\n');
strokeWeight(8);
stroke(255, 159, 3);
noFill();
}
void draw() {
background(0);
translate(width / 2, height / 2);
// ─── PREMIÈRE COUCHE ───
stroke(255);
strokeWeight(8);
for (float x = -width * 1.5; x <= width * 1.5; x += xStep) {
beginShape();
for (float y = -height * 1.5; y <= height * 1.5; y += xStep) {
float n = noise(x * noiseScaleX, y * noiseScaleY);
float cx = x + (n - 0.5) * amplitude;
vertex(cx, y);
}
endShape();
}
// ─── SECONDE COUCHE ───
pushMatrix();
rotate(radians(sensor));
stroke(255);
strokeWeight(11);
for (float x = -width * 1.5; x <= width * 1.5; x += xStep) {
beginShape();
for (float y = -height * 1.5; y <= height * 1.5; y += xStep) {
float n = noise((x + phase) * noiseScaleX, (y + phase) * noiseScaleY);
float cx = x + (n - 0.5) * amplitude;
vertex(cx, y);
}
endShape();
}
popMatrix();
angle = sensor;
println(angle);
}
// ─── LECTURE DU CAPTEUR ───
void serialEvent(Serial myPort) {
String inString = myPort.readStringUntil('\n');
if (inString != null) {
inString = trim(inString);
float[] colors = float(split(inString, ","));
sensor = map(colors[0], 200, 3000, 0, 700);
}
}
Une fois tout assemblé :